Simple Harmonic Motion
Copyright © David Boettcher 2005 - 2026 all rights reserved.Simple Harmonic Motion occurs in systems involving a mass coupled to a spring. When the mass is displaced from its rest position and released, it oscillates around the rest position at a “natural frequency” determined by the magnitude of the mass and the stiffness of the spring. If the position of the mass is plotted against elapsed time, wave-like curves such as those in the right hand side of the figure below are produced. These are called sine waves because they can be drawn by the trigonometric sine function.
The oscillator at the heart of a mechanical watch comprises a mass, the balance, coupled to a spring, the balance spring. Simple Harmonic Motion illustrates how it is able to keep time despite the amplitude of the oscillation changing, which occurs as the watch is put into different positions, dial up, pendant down etc., and as the main spring runs down. The natural frequency does not change with changes in amplitude. This just what is needed, because it endows a watch with isochronism, the ability to keep the same time whatever the amplitude of the balance.
Note that Simple Harmonic Motion is a simplified ideal that does not really exist. Real balance spring oscillators in watches are not ideal; oscillation of the balance is affected by friction with the air and at the balance staff pivots, and balance springs do not behave like ideal sparing. Nevertheless, the characteristics of Simple Harmonic Motion and sine waves can be used to analyse the behaviour of an balance and spring and give insights into what happens in a real watch oscillator.

Algebraic Analysis
To get the basic equations for simple harmonic motion, start with a vector of length (or amplitude) \(A\) rotating about the origin point \(O\) at \(\omega\) radians per second as shown in the figure above. The height \(x\) of the tip of the vector above a horizontal line through \(O\) plotted against time gives the blue sine wave shown to the right.
The displacement \(x\), which is the height of the tip of the amplitude vector \(A\) above the horizontal line passing through the origin \(O\), is given by:
\[ x = A\sin(\phi) \]The vector \(A\) is rotating about \(O\) at \(\omega\) radians per second. At time \(t\) the angle \(\phi\) is given by \(\phi = \omega t\). The height \(x\) at time \(t\) is then:
\[ x = A\sin(\omega t) \]Velocity \(v\) in the \(x\) direction at time \(t\) is given by the first differential of the equation for \(x\) with respect to time:
\[ v=\frac{dx}{dt} = \omega A \cos(\omega t) \tag{1} \]Acceleration \(a\) in the \(x\) direction at time \(t\) is given by the second differential of the equation for \(x\) with respect to time, which is also the first differential of velocity:
\[ a = \frac{d^2 x}{dt^2} = \frac{dv}{dt} = -\omega^2A\sin(\omega t) \tag{2} \]Since the second term in this equation, \(A\sin(\omega t)\), is (from the equation above) equal to \(x\), this can be substituted to give:
\[ a=-\omega^2 x \label{shm} \tag{3} \]The equations labelled 1 to 3 encapsulate the fundamentals of Simple Harmonic Motion. Equation \( \ref{shm} \) defines the essential condition for simple harmonic motion; acceleration towards the equilibrium or rest position is proportional to displacement, that is \(a \propto x\) and the constant of proportionality is \( -\omega^2 \). Force and acceleration are in the opposite direction to displacement, shown by the minus sign.
Back to the top of the page.
Period and Frequency
There are \(2\pi\) radians in a circle. The time in seconds \(T\) that vector \(A\) rotating at \( \omega \) radians per second takes to completes one revolution is:
\[ T = \frac{2\pi}{\omega} \quad \text{ and therefore } \quad \omega = \frac{2\pi}{T} \]The time \(T\) is called the time period of the system, often abbrevated to just period. It is the time that the sine wave in the figure takes to make one complete oscillation, shown by \(T\) under the sine wave. Note that one complete oscillation always includes two peaks of amplitude, velocity and acceleration.
Frequency \(f\) is the inverse of the period, so \( f = 1/T \) or:
\[ f = \frac{\omega}{2\pi} \quad \text{ and therefore } \quad \omega = 2 \pi f \]A watch escapement operating at 18,000 vibrations per hour (vph) makes 5 ticks per second. The time between each tick, 0.2 seconds, represents a complete swing in one direction or half an oscillation, so the period, the time taken to make a oscillation, is 0.4 seconds. The frequency is the inverse of the period, so the frequency of an 18,000 vph movement is 2.5 oscillations per second or 2.5 Hz.
Substituting for \(\omega\) in the equation for time period gives:
\[ T = 2 \pi \sqrt{\frac{I}{S}} \]This equation does not contain any term that is dependent on the amplitude of oscillation, which means that the period \(T\) is independent of amplitude and therefore the oscillations are isochronous. A real spring balance oscillator in a watch suffers from additional factors such as air resistance, friction, and the actions of unlocking the escapement and impulse, which detract from perfection. If these disturbances can be reduced, the isochronism of the oscillator and timekeeping of the watch will be improved.
Back to the top of the page.
Mass on Spring
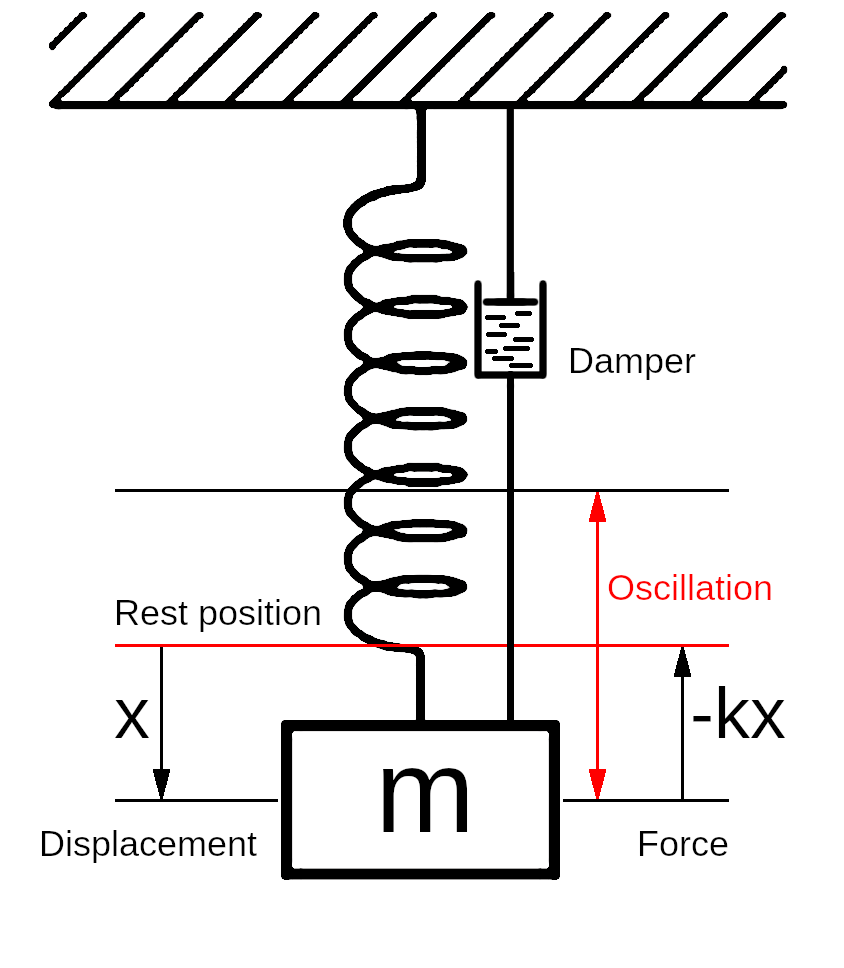
Mass suspended on a spring
A simple system where the restoring force is proportional to displacement from the rest position is a mass suspended on a spring, as shown in the figure. If the mass is moved up or down relative to its rest position and released, it will oscillate about the rest position. To study the motion of this system, laws determined by two of the greatest British scientists are used.
Hooke's Law of springs, ut tensio, sic vis or “as the extension, so the force” says that the force exerted by a spring is proportional to its extension from rest. The force exerted by a spring can be related to its extension \(x\) by a constant of proportionality called the spring constant \(k\) as in the following expression:
\[ F = -kx \]Note that the force is given a negative sign because it acts as a restoring force in the opposite direction to the extension of the spring by a movement of the mass away from its rest position. Note also that the fact that the spring is initially stretched when the mass is in its rest position, by the weight of the mass due to gravity, does not matter; this is a constant that applies all the time. It is the additional force generated in the spring when the mass moves up or down that is relevant in this analysis. If the mass and spring were horizontal, it would make no difference to the analysis.
Newton's Second Law of motion relates force to mass and acceleration in the absence of friction:
\[F = ma\]Equating these two forces gives:
\[ma = -kx \quad \text{and therefore} \quad a = - \left ( \frac{k}{m} \right ) x \]This is of the same form as the simple harmonic motion relationship between acceleration and displacement in equation \( \ref{shm} \) above, with the constant \(\frac{k}{m}\) in the place of \(\omega^2\). Equating \(\omega^2\) with \(\frac{k}{m}\) gives:
\[ \omega^2 = \frac{k}{m} \quad \text{and therefore} \quad \omega = \sqrt{\frac{k}{m}}\]The frequency of oscillation is determined by the spring constant and the mass and is called the natural frequency of the system. Substituting \( \sqrt{k/m} \) for \( \omega \) in the equation for period gives the natural period of oscillation:
\[T=\frac{2\pi}{\omega} = 2\pi\sqrt{\frac{m}{k}}\]This equation takes no account of the effect of friction. In practice, the period of oscillation is affected by friction at the pivots of the balance staff and by air resistance. These effects increase the resistance to acceleration of the balance and therefore act a little like increasing the mass of the balance, although friction and drag are dependent on velocity and, unlike mass, are zero when the balance is stationary.
Back to the top of the page.
Circular Oscillations
Simple harmonic motion can be used to examine the oscillations of a watch balance and spring. In engineering, a “moment” means something turning around a fixed point. To adapt the equations of linear simple harmonic motion to circular motion,
- Mass is replaced by rotational inertia or moment of inertia \(I\).
- Linear force is replaced by turning force, moment of force or torque \(\tau\).
- Displacement is angular rather than linear, denoted by \(\theta\) instead of \(x\).
- The spring constant \(S\) gives the torque in proportion to the angular displacement.
- Linear acceleration is replaced by angular acceleration \(\alpha\).
The basic equation for Simple Harmonic Motion can be restated in circular terms by replacing the acceleration \(a\) with angular acceleration \(\alpha\) and the displacement \(x\) with angular displacement \(\theta\) as follows:
\[ \alpha = -\omega^2 \theta \]Hooke's law restated for a spiral or helical spring is that the restoring torque exerted by the spring is proportional to the spring constant multiplied by the angular displacement, the angle that one end of the spring is turned relative to the other, so that:
\[ \tau = -S \theta \]Newton's second law restated for circular motion is that torque is equal to the moment of inertia of the balance multiplied by the angular acceleration, so that:
\[ \tau = I \alpha \]In an oscillating balance and spring assembly, inertia opposes torque, so Hooke's and Newton's laws can be equated as:
\[ \tau = I \alpha = -S \theta \] \[ \therefore \alpha = -\frac{S}{I} \theta \]This is the same form as the basic equation of Simple Harmonic Motion, with the constant \(\frac{S}{I}\) taking the place of \(\omega^2.\) Therefore:
\[ \omega^2 = \frac{S}{I} \quad \text{and} \quad \omega_n = \sqrt{\frac{S}{I}} \]Back to the top of the page.
Balance Velocity
It is useful to know the velocity of the balance as it swings through the centre line of the escapement, because this is used by timing machines to estimate the amplitude.
The analysis can potentially get confusing; it must be remembered that \(\omega\) is the angular velocity of the SHM vector, which is a constant, whereas \(v\) is the angular velocity of the balance as it is oscillating, which varies from zero at the extremes of its swing, or arc of vibration, to a maximum as it passes through the middle of its swing. From the equations in the analysis section above, the angular velocity of the balance is given by:
\[ v = \omega A \cos(\omega t) \]The value of a cosine function varies between 0 and 1, so velocity is at a maximum when \(cos( \omega t) = 1 \).
\[v_{max} = \omega A \]The equation for period can be used to express \( \omega\ \) in terms of the period \(T\):
\[T = \frac{2\pi}{\omega} \quad \textrm{therefore} \quad \omega = \frac{2\pi}{T} \]Substituting for \(\omega\) into the equation for \(V_{max}\) gives:
\[ v_{max} = \frac{2\pi A}{T} \]Velocity Example
In watch terms, an oscillation is two vibrations of the balance, or two ticks of a lever escapement. An 18,000 vph (vibrations per hour) lever escapement movement makes 5 ticks per second. Its frequency is half that; 2.5 Hz, and its period \(T=0.4\textrm{sec} \).
For an 18,000 vph balance with an amplitude of 270°:
$$\begin{aligned} v_{max} &= \frac{2\pi\times 270}{0.4} \\ &= 4,241^\circ\textrm{/sec} \\ &= 74.022 \textrm{ radians/sec} \\ &= 11.8 \textrm{ revolutions/sec} \end{aligned}$$Of course the balance isn't actually revolving at nearly 12 revolutions per second; this is its instantaneous peak angular velocity as it passes though the central position, which occurs twice per oscillation.
The linear velocity of the rim of the balance is given by angular velocity in radians per second multiplied by the radius of the rim. A 10mm diameter balance will therefore have a peak velocity:
\[ v_{linmax} = 74.022 \times 5.10^{-3} = 0.37 \textrm{ m/sec} \]A Hamilton Model 21 marine chronometer has a balance 35.6mm diameter. The balance oscillates at 14,400 vph to give half second ticks, so the period \( T \) = 0.5 seconds. If the amplitude is 270° or 4.7 radians:
\[v_{max} = \frac{2\pi\times 4.7}{0.5} = 59 \textrm{ radians/sec} \]Back to the top of the page.
Balance Amplitude
The amplitude of the balance is a good indication of the condition of a movement. When the mainspring is fully wound, the amplitude of a clean and well-oiled movement should be at least 270° in the horizontal positions, dial up and down, and 220° when vertical.
The balance amplitude cannot be calculated from first principles, it is entirely determined by the impulse delivered during escapement, the restoring force of the balance spring and frictional losses.
The amplitude decreases as the mainspring runs down, because the force of impulse reduces. The amplitude is always lower in the vertical positions than the horizontal ones. This is because in the horizontal positions the balance staff is turning like a top with its lower pivot on an end stone with very low friction, whereas in the vertical positions the ends of the staff are laying horizontally in the jewel hole bearings like a cart axle with much higher friction.
Variations in atmospheric pressure also affect the amplitude, by altering the drag of air resistance on the balance. An increase in air pressure causes the balance to lose energy at a greater rate, so that the restoring force of the balance spring brings it to a halt sooner.
It is difficult to measure the balance amplitude directly, so watch timing machines infer it from the timing of the sounds made during escape and impulse.
During escape and impulse, three distinct sounds are recorded by the timing machine. The first is the sound of the impulse pin contacting the lever fork, which is the start of unlocking. Once the escape wheel is unlocked, it takes over driving the lever and the opposite side of the lever fork contacts the impulse pin, which is the start of impulse and causes the second sound. The third and final sound is a combination of a pallet locking the escape wheel and the lever hitting the banking.
Strictly speaking, the lift angle is the angle through which the balance travels during impulse. However, in the context of timing machines, it is conventional to call the lift angle the angle that the balance travels from the initial sound of the impulse pin contacting the lever fork to sound of the lever contacting the banking. The lift angle can be determined physically from the geometry of the escapement. By timing how long it takes the balance to travel through the lift angle, the average velocity of the balance during the period can be calculated, from which the amplitude can be estimated.
At the point of escape and impulse, the balance is travelling at its greatest angular velocity, defined above as \( v_{max} \), which is given by the expression:
\[ v_{max} = \frac{2\pi A}{T} \]This expression works with amplitude in radians or degrees, the result will be in the same units. The expression can be rearranged in terms of amplitude:
\[ A = v_{max} \frac{T}{2 \pi} \]The lift time is the length of time it takes the balance to travel through the lift angle. The average angular velocity over the lift angle can be calculated as:
\[ v_{avg} = \frac{\text{lift angle}}{\text{lift time}} \]The maximum velocity \(v_{max}\) occurs only for an instant at the centre line position, therefore \(v_{avg}\) will not be quite the same because it is an average over the lift angle and because of the interference of unlocking and impulse, but it can be taken as a reasonable approximation. The amplitude can then be estimated as:
\[ A = \frac{\text{lift angle}}{\text{lift time}} \frac{T}{2 \pi} \]Amplitude Example
An 18,000 vph movement has a lift angle of 52° and the lift time measured on a timing machine of 12 milliseconds (0.012 seconds). The movement makes 5 ticks per second so the ticks are \(\frac{1}{5}\) or 0.2 seconds apart. The period \(T\) of a complete oscillation is two ticks, which is 0.4 seconds. The amplitude is then estimated as:
\[ A = \frac{52}{0.12} \frac{0.4}{2 \pi} = 276^\circ \]Back to the top of the page.
Beat Error
A beat error occurs when the balance takes take a different amount of time to swing in one direction than it does in the other. It is caused by the impulse pin at rest not being exactly on the centre line between the balance and lever. The time difference between alternating ticks of the escapement is displayed on a timing machine as the beat error.
As the balance swings through the zero position it is rotating at its maximum angular velocity,
\[ v_{max} = \frac{2\pi A}{T} \]The beat error is the difference between the time of the two swings of the balance. To correct it, one swing must be made longer and the other shorter. This is done by rotating the collet so that the impulse pin at rest is exactly on the centre line between the balance and lever.
Back to the top of the page.
Energy
As a balance oscillates, its kinetic energy is converted into potential energy stored in the spring, and vice versa.
At each end of the swing, when the balance is momentarily stationary, its kinetic energy is zero and all the energy is stored in the spring. At the moment the balance passes through the mid point of its swing, it is travelling with maximum velocity and all the energy is in the kinetic energy of the balance.
The total energy in the system at any moment is the sum of the kinetic energy of the balance and the potential energy of the spring.
Kinetic energy of a mass moving in a straight line is given by the equation \( E_k = \frac{1}{2}mv^2 \). The kinetic energy of a rotating object with moment of inertia \(I\) is given by:
\[ E_k = \frac{1}{2}Iv^2 \]The kinetic energy of the balance is greatest when it is travelling with maximum velocity. The instantaneous velocity of the balance is given by:
\[ v=\omega A \cos(\omega t) \]The value of a cosine function varies between 0 and 1, so velocity is at a maximum when \(cos( \omega t) = 1 \).
\[V_{max} = \omega A \]The vector angle \(\omega\) is related to the period \(T\) by the equation:
\[ \omega = \frac{2\pi}{T} \]Substituting these into the first equation gives:
\[ E_{k(max)} = \frac{1}{2}I \left ( \frac{2\pi}{T} A \right ) ^2 \]This can also be written:
\[ E_{k(max)} = I \cdot \left ( \frac{2\pi}{T} \right ) ^2 \cdot \frac{A^2}{2} \]Energy Example
A Hamilton Model 21 marine chronometer has a balance 35.6mm diameter with a mass of 5.1 gram. Not all of the mass will be in the rim, and the radius of gyration will be less that the radius of the balance, but for a first-order approximation let's take these dimensions. The amplitude is 270°, which is 4.7 radians. The balance oscillates at 14,400 vph, so T = 0.5 seconds.
\[ E_{k(max)} = 5.1\times10^{-3} \cdot (17.8 \times 10^{-3})^2 \cdot \left ( \frac{2\pi}{0.5} \right ) ^2 \cdot \frac{4.7^2}{2} = 2.82 \times 10^{-3} \textrm{joule} \]Total Energy
As the balance swings the balance spring bends along its length, coiling and uncoiling, which stores and releases energy. When the balance reaches the limits of its swing at, say, +/- 270°, the spring is at its maximum bend and the balance stops moving as its swing reverses. At the this point, all the energy of the system is stored in the spring. The spring accelerates the balance towards the neutral position. As it passes through the neutral position, the velocity of the balance is at its maximum and the spring force becomes zero as it stops accelerating the balance and starts slowing it down.
Kinetic energy is given in angular terms by \( \frac{1}{2}I(v)^2 \). The Hamilton balance has a mass of 5.1 gram and a diameter of 35.6mm giving a radius of 17.8mm. Not all of the mass will be in the rim, and the radius of gyration will be less that the radius of the balance, but for a first-order approximation let's take these dimensions:
\[ \frac{1}{2} \times 5.1 \! \times \! 10^{-3} \times (17.8 \! \times \! 10^{-3})^2 \times 59^2 = 2.81\!\times\!10^{-3} joule \]The maximum linear velocity \(L\) of the rim is given by its radius multiplied by the maximum angular velocity:
\[ L = 17.8\!\times\!10^{-3} \times 59 = 1.05 m/s \quad \textrm{which is just over 2 miles per hour.} \]So although the balance looks like it is moving pretty quickly, its small size means that its speed through the air is quite low. The peak kinetic energy of the balance is then:
\[ KE = \frac{1}{2} mL^2 = \frac{1}{2} 5.1\! \times\! 10^{-3} \times 1.05^2 = 2.81\!\times\!10^{-3} joule\]If you have any comments or questions, please don't hesitate to get in touch via my Contact Me page.
Copyright © David Boettcher 2005 - 2026 all rights reserved. This page updated December 2024.
Back to the top of the page.